Output devices¶
This week’s group assignment is to measure the power consumption of an output device
LED strip¶
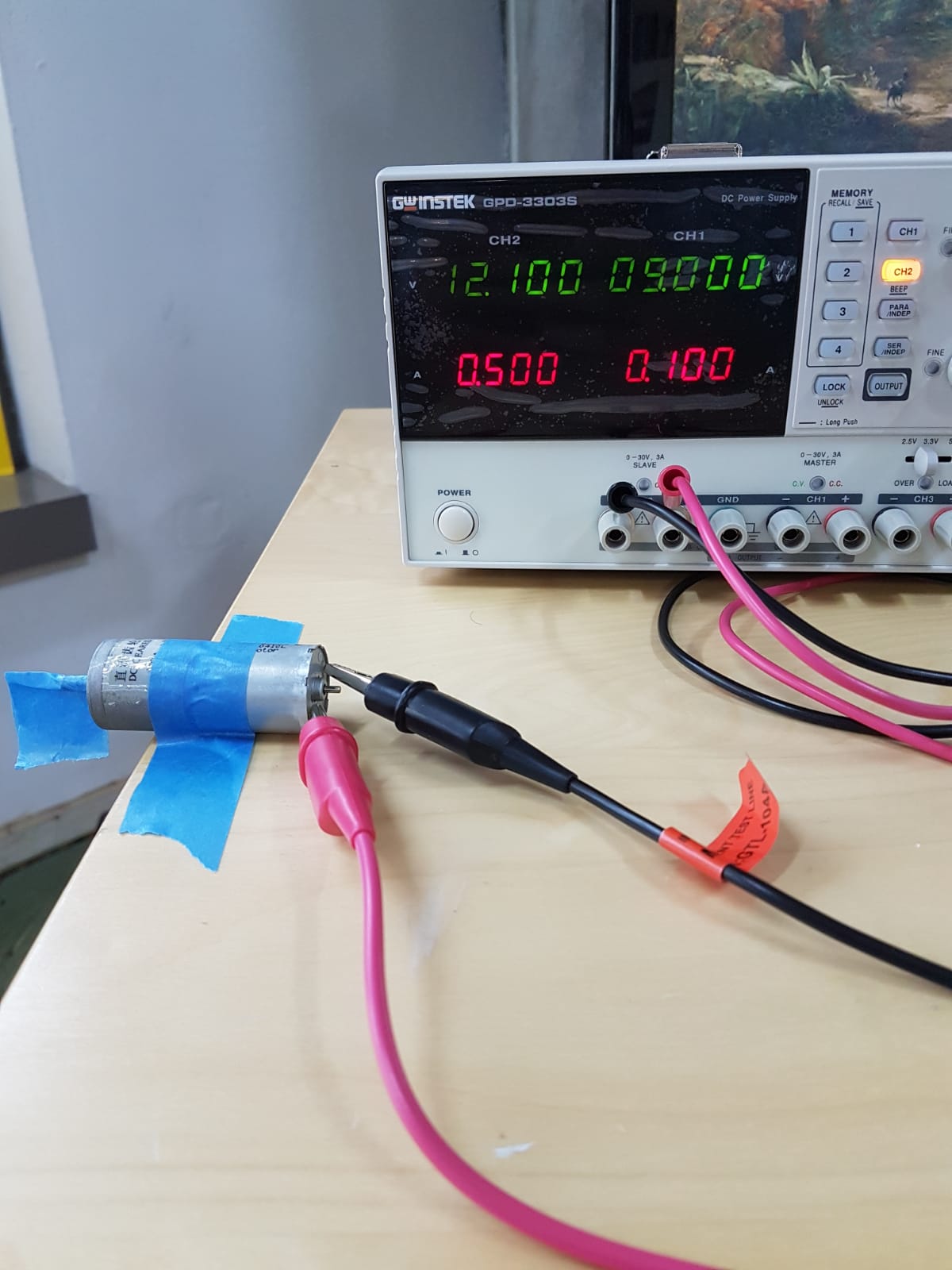
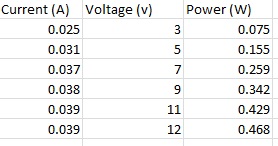
To measure the output consumption we need to measure the current and the voltage to apply them in the formula P=V*I this means that the power consumption cant be measured directly.

12 v * 2.26 A = 27.12 W
Servo Motor¶
Servo motors use feedback to determine the position of the shaft, you can control that position precisely. As a result, servo motors are used to control the position of objects, rotate objects, move legs, arms or hands of robots, move sensors etc. Servo motors are small in size, and because they have built-in circuitry to control their movement, they can be connected directly to your circuit.
Most servo motors have the following three connections:
Black/Brown ground wire. Red power wire (around 5V). Yellow or White PWM wire.
Servo control is achieved by sending a servo a PWM (pulse-width modulation) signal, a series of repeating pulses of variable width where either the width of the pulse or the duty cycle of a pulse train determines the position to be achieved by the servo. The PWM signal might come from a radio control receiver to the servo or from common microcontrollers such as the Arduino.
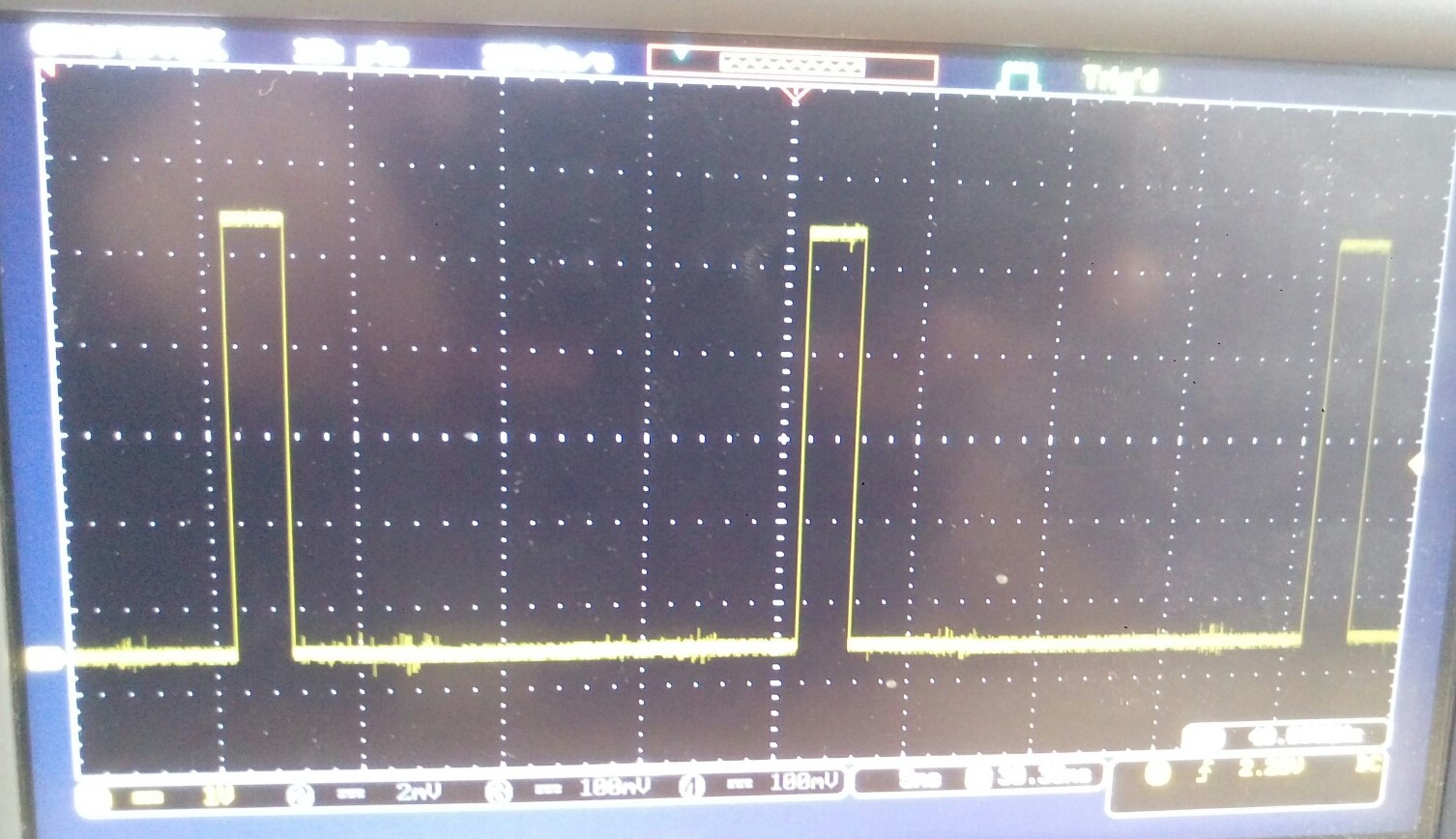
as you can see from the photo… the signal is 20ms width which means the frequency is (1/(20*10^-3)) = 50Hz
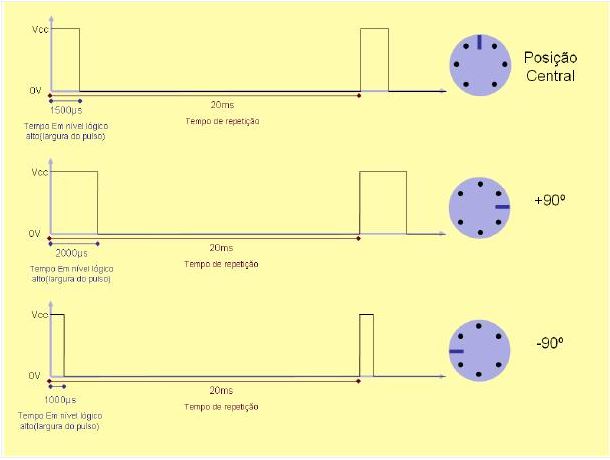
We measured the pulses of a servo motor. The time division is 5ms. between rise edge of pulses=20 ms which is similar to servo requirment.
motor¶
Carbon fiber heat pad¶
Fatima made some experiments for her final project heat pad so she made a carbon fiber heat pad which we used for this assignment.